been re-stabilized, adding the integral feedback control will
eliminate back the permanent error as we can see in Figure
12. This time, this could very well be the end on the story!
analysis on a continuous basis and to have to suffer the impact of
the time lag in the feedback control, Desclaux [3] proposed to
control the bath chemistry based on the feedback from the cell
operating temperature.
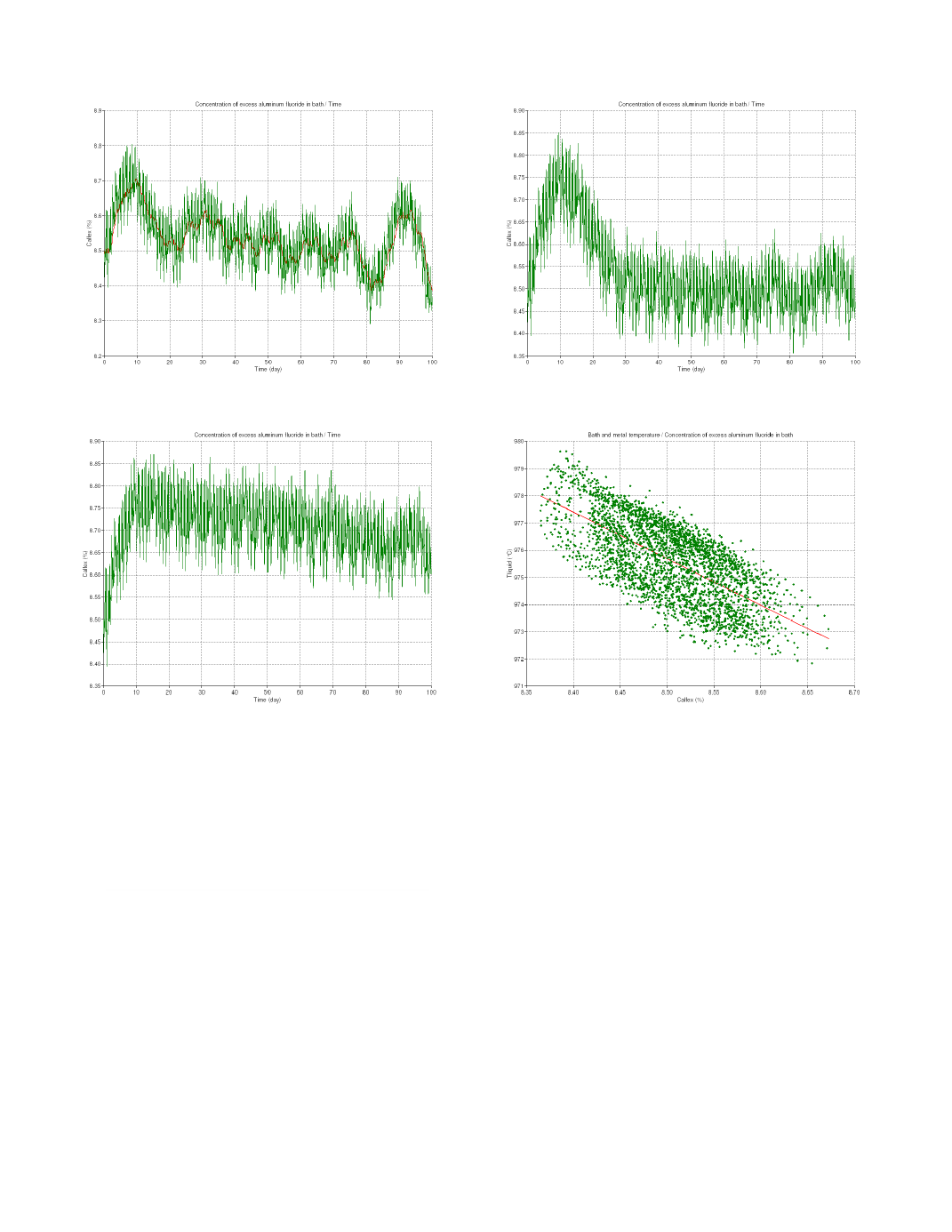
between the excess AlF3 concentration in the bath and the cell
established through the relation that exists between the bath
chemistry and its liquidus temperature and the fact that there is a
strong correlation between the bath liquidus temperature and the
cell operating temperature through the cell superheat.
strong as there are many short term events that influence the cell
instantaneous cell superheat like the alumina feeding regime
(overfeeding or underfeeding) and events like anode change, anode
effect, noise treatment, etc. Furthermore, other bath additives like
alumina and CaF2 also influence the bath liquidus temperature.
control the excess AlF3 concentration, although it eliminates the
feedback response as we will see below.
0.1 kg/hrºC proportional constant. Even with that quite small
proportional constant leaving a huge permanent error, we can see
that the extensive temperature noise has introduced some non
negligible instability in the response. Furthermore, the constant is
so small that the response is not so different from the case
presented in Figure 3 where there is no control at all.